Regularized Poisson NMF on a toy dataset
This notebook is part of the ESPM package. It is available on github
In this notebook, we show how to solve a regularized Poisson Non Negative Matrix Factorization (NMF) on a toy dataset. The general goal of this problem is to separate a matrix \(X\) into two matrices \(D\) and \(H\) such that \(X \approx DH\). We will assume that \(D\) is the product of two matrices \(G\) and \(W\) such that \(D = GW\). The matrix \(G\) is assumed to be known and therefore \(W\) is the matrix we want to find. In the field of electro-microscopy, the matrix \(GW\) represent the phases, the matrix \(H\) is the matrix of maps (or weights) and \(X\) is the data matrix. The maps \(H\) are 2D images. Furthermore, we will assume that \(W, H\) are non-negative or more generally greater than a small positive value \(\epsilon\).
The data measured data \(X\) is follow a Poisson distribution, i.e. \(X_{ij} \sim \text{Poisson}(n_p\dot{X}_{ij})\). In the context of electro-microscopy, \(n_p\) is the number of photons per pixel. \(\dot{X} = G \dot{W} \dot{H}\) would correspond a noiseless measurement.
The size of:
\(X\) is (n, p),
\(W\) is (m, k),
\(H\) is (k, p),
\(G\) is (n, m).
In general, m is assumed to be much smaller than n and \(G\) is assumed to be known. The parameter shape_2d defines the shape of the images for the columns of \(H\) and \(X\), i.e. shape_2d[0]*shape_2d[1] = p.
Mathematically. the problem can be formulated as:
Here \(D_{GKL}\) is the fidelity term, i.e. the Generalized KL divergence
The loss is regularized using two terms: a Laplacian regularization on \(H\) and a log regularization on \(H\). \(\lambda\) and \(\mu\) are the regularization parameters. The Laplacian regularization is defined as:
where \(\Delta\) is the Laplacian operator (it can be created using the function :mod:espm.utils.create_laplacian_matrix). Note that the columns of the matrices :math:`H` and :math:`X` are assumed to be images.
The log regularization is defined as:
where \(\epsilon_{reg}\) is the slope of log regularization at 0. This term acts similarly to an L1 penalty but affects less larger values.
Finally, we assume \(W,H\geq \epsilon\) and that the lines of \(H\) sum to 1:
This is done by adding the parameter simplex_H=True to the class espm.estimators.SmoothNMF. This constraint is essential as it prevent the algorithm to find a solution where all the maps tend to 0 because of the other constraints. Note that the same constraint could be applied to \(W\) using simplex_W=True. These two constraint should not be activated at the same time!
In this notebook, we will use the class espm.estimators.SmoothNMF to solve the problem.
Imports and function definition
Let’s start by importing the necessary libraries.
[1]:
# Some useful modules for notebooks
%load_ext autoreload
%autoreload 2
%matplotlib inline
[2]:
import numpy as np
import matplotlib.pyplot as plt
from espm.estimators import SmoothNMF
from espm.measures import find_min_angle, ordered_mse, ordered_mae, ordered_r2
from espm.models import ToyModel
from espm.weights import generate_weights as gw
from espm.datasets.base import generate_spim_sample
from espm.utils import process_losses
/home/docs/checkouts/readthedocs.org/user_builds/espm/envs/latest/lib/python3.11/site-packages/tqdm/auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
/home/docs/checkouts/readthedocs.org/user_builds/espm/envs/latest/lib/python3.11/site-packages/hyperspy/misc/_utils.py:1590: VisibleDeprecationWarning: Importing `LazyComplexSignal1D` from `hyperspy._signals.complex_signal1d` is deprecated and will be removed in the HyperSpy 3.0 release. Import it from `hyperspy.signals` instead.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/espm/envs/latest/lib/python3.11/site-packages/hyperspy/misc/_utils.py:1590: VisibleDeprecationWarning: Importing `LazySignal1D` from `hyperspy._signals.signal1d` is deprecated and will be removed in the HyperSpy 3.0 release. Import it from `hyperspy.signals` instead.
warnings.warn(
/home/docs/checkouts/readthedocs.org/user_builds/espm/envs/latest/lib/python3.11/site-packages/hyperspy/misc/_utils.py:1590: VisibleDeprecationWarning: Importing `LazySignal1D` from `hyperspy._signals.signal1d` is deprecated and will be removed in the HyperSpy 3.0 release. Import it from `hyperspy.signals` instead.
warnings.warn(
Now we define the parameters that will be used to generate the data.
[3]:
seed = 42 # for reproducibility
m = 15 # Number of components
n = 200 # Length of the phases
n_poisson = 300 # Average poisson number per pixel (this number will be splitted on the m dimension)
densities = np.random.uniform(0.1, 2.0, 3) # Random densities
[4]:
def get_toy_sample():
model_params = {"L": n, "C": m, "K": 3, "seed": seed}
misc_params = {"N": n_poisson, "seed": seed, 'densities' : densities, "model": "ToyModel"}
toy_model = ToyModel(**model_params)
toy_model.generate_phases()
phases = toy_model.phases.T
weights = gw.generate_weights("toy_problem", None)
sample = generate_spim_sample(phases, weights, model_params,misc_params, seed = seed)
return sample
def to_vec(X):
n = X.shape[2]
return X.transpose(2,0,1).reshape(n, -1)
sample = get_toy_sample()
GW = sample["GW"].T
G = sample["G"]
H = to_vec(sample["H"])
X = to_vec(sample["X"])
Xdot = to_vec(sample["Xdot"])
shape_2d = sample["shape_2d"]
Let us look at the dimension of our problem.
[5]:
print(f"""
- X: {X.shape}
- Xdot: {Xdot.shape}
- G: {G.shape}
- GW: {GW.shape}
- H: {H.shape}
- shape_2d: {shape_2d}
""")
- X: (200, 10000)
- Xdot: (200, 10000)
- G: (200, 15)
- GW: (200, 3)
- H: (3, 10000)
- shape_2d: (100, 100)
Here Xdot contains the noisless data such that the ground truth H and GW satisfies:
[6]:
np.testing.assert_allclose(Xdot, GW @ H)
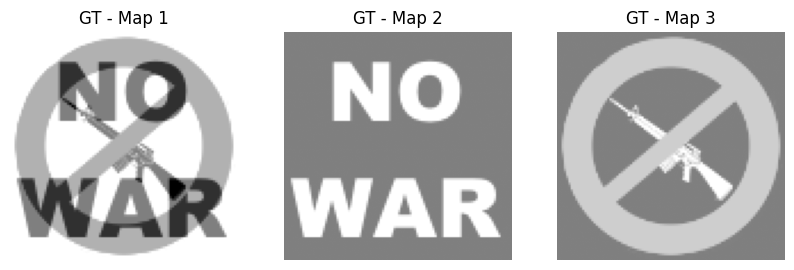
Let us plot the ground truth maps \(H\) (sometimes also called weights). Here the variable shape_2d is used to reshape the columns of \(H\) into images.
[7]:
vmin, vmax = 0,1
cmap = plt.cm.gray_r
plt.figure(figsize=(10, 3))
for i, hdot in enumerate(H):
plt.subplot(1,3,i+1)
plt.imshow(H[i].reshape(shape_2d), cmap=cmap, vmin=vmin, vmax=vmax)
plt.axis("off")
plt.title(f"GT - Map {i+1}")
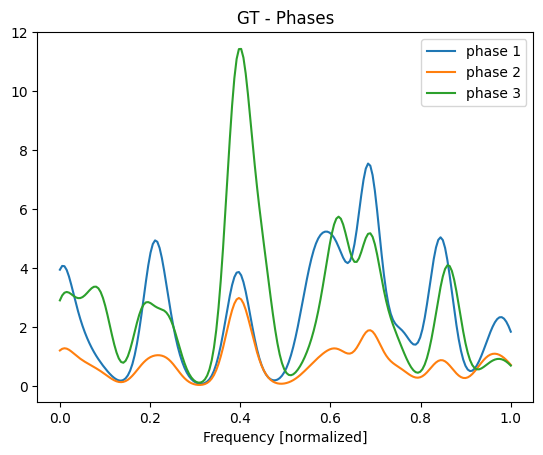
We can also plot the phases corresponding to these maps. The phases corresponds to the matrix \(GW\).
[8]:
e = np.linspace(0,1, GW.shape[0])
plt.plot(e, GW)
plt.title("GT - Phases")
plt.xlabel("Frequency [normalized]")
plt.legend([f"phase {i+1}" for i in range(3)]);
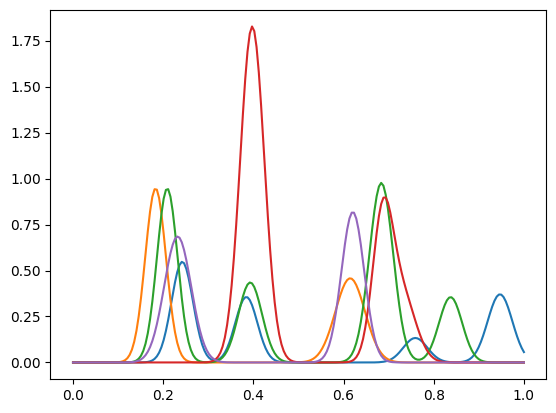
The matrix \(G\) is assumed to be known appriori. Here we plot the first 5 lines of \(G\).
[9]:
l = np.linspace(0, 1,n)
plt.plot(l, G[:,:5]);
Note that the function create_toy_sample did not return \(W\) but only \(GW\).
Using the ground truth \(GW\), it can be computed as follows:
[10]:
W = np.linalg.lstsq(GW, G, rcond=None)[0].T
W.shape
[10]:
(15, 3)
Solving the problem
Parameters
Let us define the different hyperparameters of the problem. Feel free to change them and see how the results change.
Let us first define our regularisation parameters.
[11]:
lambda_L = 2 # Smoothness of the maps
mu = 0.05 # Sparsity of the maps
We can additionally add a simplex constraint to the problem by setting simplex_H=True. This will add the constraint that the line of \(H\) sum to 1. This constraint should be activated for the regularizers to work!. Practically, it will prevent the algorithm from simply minimizing \(W\) and increasing \(H\).
[12]:
simplex_H = True
simplex_W = False
Finally, we can decide to specify \(G\) or not. If the matrix \(G\) is not specified, the algorithm will directly estimate \(GW\) insead of \(W\).
[13]:
Gused = G
Note that wihtout regularisation, i.e. with the parameters
lambda_L = 0
mu = 0
Gused = None
simplex_H=False
simplex_W = False
we recover the classical Poisson/KL NMF problem. Our algorithm will apply the MU algorithm from Lee and Seung (2001).
Let us define the parameters for the algorithm. Here the class espm.estimator.SmoothNMF heritates from sckit-learn’s NMF class.
[14]:
K = len(H) # Number of components / let assume that we know it
params = {}
params["tol"]=1e-6 # Tolerance for the stopping criterion.
params["max_iter"] = 200 # Maximum number of iterations before timing out.
params["hspy_comp"] = False # If should be set to True if hspy data format is used.
params["verbose"] = 1 # Verbosity level.
params["eval_print"] = 10 # Print the evaluation every eval_print iterations.
params["epsilon_reg"] = 1 # Regularization parameter
params["linesearch"] = False # Use linesearch to accelerate convergence
params["shape_2d"] = shape_2d # Shape of the 2D maps
params["n_components"] = K # Number of components
params["normalize"] = True # Normalize the data. It helps to keep the range of the regularization parameters lambda_L and mu in a reasonable range.
estimator = SmoothNMF(mu=mu, lambda_L=lambda_L, G = Gused, simplex_H=simplex_H, simplex_W=simplex_W, **params)
The function fit_transform will solve the problem and return the matrix \(GW\).
[15]:
GW_est = estimator.fit_transform(X)
It 10 / 200: loss 5.633201e-03, 6.402 it/s
It 20 / 200: loss 5.575573e-03, 6.564 it/s
It 30 / 200: loss 5.548512e-03, 6.628 it/s
It 40 / 200: loss 5.530533e-03, 6.665 it/s
It 50 / 200: loss 5.517893e-03, 6.684 it/s
It 60 / 200: loss 5.508361e-03, 6.695 it/s
It 70 / 200: loss 5.500222e-03, 6.699 it/s
It 80 / 200: loss 5.492522e-03, 6.706 it/s
It 90 / 200: loss 5.484959e-03, 6.713 it/s
It 100 / 200: loss 5.477646e-03, 6.716 it/s
It 110 / 200: loss 5.470870e-03, 6.721 it/s
It 120 / 200: loss 5.464889e-03, 6.725 it/s
It 130 / 200: loss 5.459858e-03, 6.725 it/s
It 140 / 200: loss 5.455794e-03, 6.724 it/s
It 150 / 200: loss 5.452605e-03, 6.726 it/s
It 160 / 200: loss 5.450136e-03, 6.728 it/s
It 170 / 200: loss 5.448216e-03, 6.728 it/s
It 180 / 200: loss 5.446693e-03, 6.727 it/s
It 190 / 200: loss 5.445447e-03, 6.729 it/s
exits because max_iteration was reached
Stopped after 200 iterations in 0.0 minutes and 30.0 seconds.
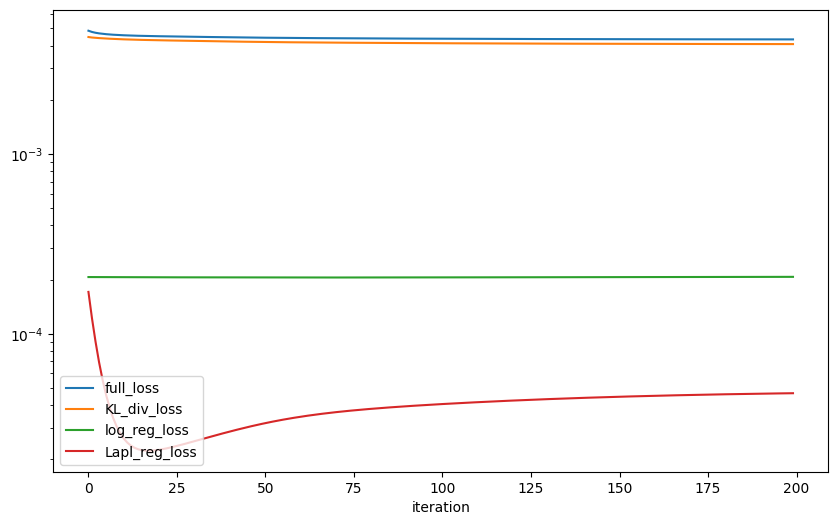
We can plot the different losses to see how the algorithm converges.
[16]:
losses = estimator.get_losses()
values, names = process_losses(losses)
plt.figure(figsize=(10, 6))
for name, value in zip(names[:4], values[:4]):
plt.plot(value, label=name)
plt.xlabel("iteration")
plt.yscale("log")
plt.legend()
[16]:
<matplotlib.legend.Legend at 0x7317e9b93890>
[17]:
losses[0]
[17]:
np.void((0.0059559132758474805, 0.005553782900998908, 0.000206157907230964, 0.00019597246761760833, 8.0, 0.45264600023275037, 0.6064940305226312), dtype=[('full_loss', '<f8'), ('KL_div_loss', '<f8'), ('log_reg_loss', '<f8'), ('Lapl_reg_loss', '<f8'), ('gamma', '<f8'), ('rel_W', '<f8'), ('rel_H', '<f8')])
We can easily recover \(W\) and \(H\) from the estimator.
[18]:
H_est = estimator.H_
W_est = estimator.W_
Let us compute some metrics to evaluate the quality of the solution. We will use the metrics defined in the module espm.metrics.
We first compute the angles between the phases GW and the estimated phases GW_est. The angles are computed using the function compute_angles. This function also return the indices to match the estimations and the ground truths. Indeed, there is no reason for them to have the same order.
[19]:
angles, true_inds = find_min_angle(GW.T, GW_est.T, unique=True, get_ind=True)
print("angles : ", angles)
angles : [np.float64(3.4977109417608268), np.float64(20.623076050519774), np.float64(35.9015397653277)]
Now, we can compute the Mean Squared Error (MSE) between the maps H and the estimated maps H_est.
[20]:
mse = ordered_mse(H, H_est, true_inds)
print("mse : ", mse)
mse : [0.07679654654050933, 0.03742042688727024, 0.06939255551650722]
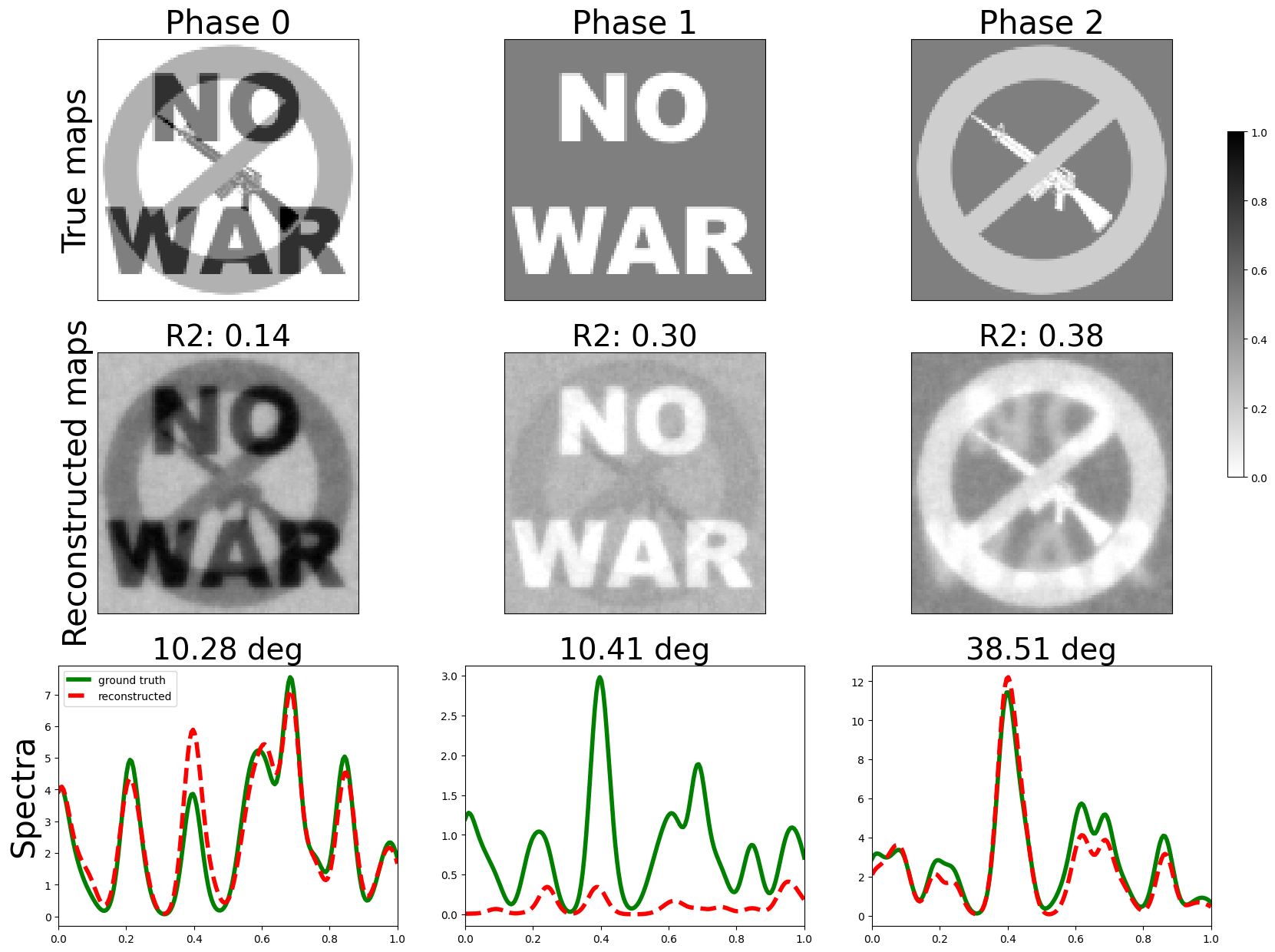
Finally, let us plot the results.
[21]:
def plot_results(Ddot, D, Hdotflat, Hflat):
fontsize = 30
scale = 15
aspect_ratio = 1.4
marker_list = ["-o","-s","->","-<","-^","-v","-d"]
mark_space = 20
# cmap = plt.cm.hot_r
cmap = plt.cm.gray_r
vmax = 1
vmin = 0
K = len(H)
L = len(D)
angles, true_inds = find_min_angle(Ddot.T, D.T, unique=True, get_ind=True)
mse = ordered_mse(Hdotflat, Hflat, true_inds)
mae = ordered_mae(Hdotflat, Hflat, true_inds)
r2 = ordered_r2(Hdotflat, Hflat, true_inds)
fig, axes = plt.subplots(K,3,figsize = (scale/K * 3 * aspect_ratio,scale))
x = np.linspace(0,1, num = L)
for i in range(K):
axes[2,i].plot(x,Ddot.T[i,:],'g-',label='ground truth',linewidth=4)
axes[2,i].plot(x,D[:,true_inds[i]],'r--',label='reconstructed',linewidth=4)
axes[2,i].set_title("{:.2f} deg".format(angles[i]),fontsize = fontsize-2)
axes[2,i].set_xlim(0,1)
axes[1,i].imshow((Hflat[true_inds[i],:]).reshape(shape_2d),vmin = vmin, vmax = vmax , cmap=cmap)
axes[1,i].set_title("R2: {:.2f}".format(r2[true_inds[i]]),fontsize = fontsize-2)
# axes[i,1].set_ylim(0.0,1.0)
axes[1,i].tick_params(axis = "both",labelleft = False, labelbottom = False,left = False, bottom = False)
im = axes[0,i].imshow(Hdotflat[i].reshape(shape_2d),vmin = vmin, vmax = vmax, cmap=cmap)
axes[0,i].set_title("Phase {}".format(i),fontsize = fontsize)
axes[0,i].tick_params(axis = "both",labelleft = False, labelbottom = False,left = False, bottom = False)
axes[2,0].legend()
rows = ["True maps","Reconstructed maps","Spectra"]
for ax, row in zip(axes[:,0], rows):
ax.set_ylabel(row, rotation=90, fontsize=fontsize)
fig.subplots_adjust(right=0.84)
# put colorbar at desire position
cbar_ax = fig.add_axes([0.85, 0.5, 0.01, 0.3])
fig.colorbar(im,cax=cbar_ax)
# fig.tight_layout()
print("angles : ", angles)
print("mse : ", mse)
print("mae : ", mae)
print("r2 : ", r2)
return fig
fig = plot_results(GW, GW_est, H, H_est)
plt.show()
angles : [np.float64(3.4977109417608268), np.float64(20.623076050519774), np.float64(35.9015397653277)]
mse : [0.07679654654050933, 0.03742042688727024, 0.06939255551650722]
mae : [0.2618924202624436, 0.1610918723949444, 0.22852099838455406]
r2 : [-0.044578982963364266, -0.5420112504938881, -0.6016867444779574]